cmr_lidarloop
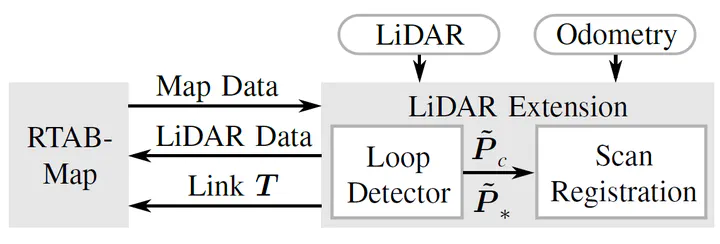
cmr_lidarloop is a ROS package that can be used to detect loops in 3D-Lidar data. It was developed as an extension to the well-known SLAM library RTAB-Map and integrates seamlessly into RTAB-Map’s topic structure. One disadvantage of RTAB-Map is its insufficient use of 3D-Pointcloud data for loop closure detection. This problem is solved by cmr_lidarloop, which makes use of global feature classification and pointcloud registration and can therefore significantly enhance RTAB-Maps performance in challenging environments (e.g. when illumination changes).
It contains one module for loop-closure detection and subsequent loop verification and another module for scan registration and is avaiable on GitHub. The library originated from the master thesis of one of my supervised students, Tim-Lukas Habich. More information can be found in the documentation.