Delta Robot Tic Tac Toe
Sep 27, 2016
·
1 min read
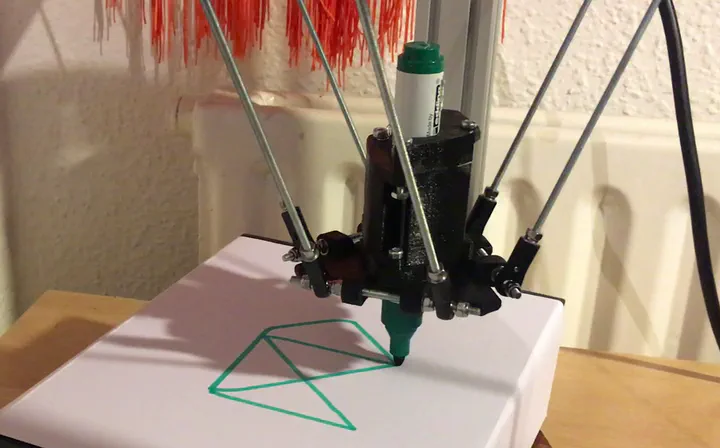
I built this Delta Robot as a Side Project during learning the theory about parallel robots in university. It is a completely custom design, consisting of 3D printed, wooden and Aluminium parts. The three stepper motos of the robot are controlled by an Arduino Mega.
This project was my very first contact with ROS, so I developed a custom driver interface for my Robot and a GUI to control it. The robot has a gripper to pick up a pencil, which can then draw any type of 2D Drawing on a sheet of paper. I originally planned to also implement a camera so that you can play Tic Tac Toe against the robot, but unfortunately I never finished this project due to lack of time.