Trajectory planning and image feedback control of an 3D inverted pendulum
Nov 1, 2015
·
1 min read
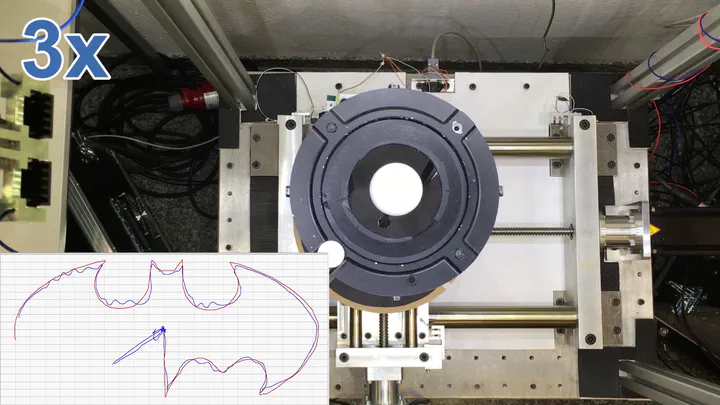
This was by bachelor’s thesis, which I did in 2015 on an inverted 3D pendulum. I implemented several new state space control approaches (e.g. optimal control and adaptive control) and compared them with already existing approaches. Additionally I developed a method to drive arbitrary 2D trajectories with the pendulum, while keeping the pendulum in balance.