KMR iiwa Champagne Waiter Demonstration
Apr 25, 2018
·
1 min read
 Copyright Michael Siebert
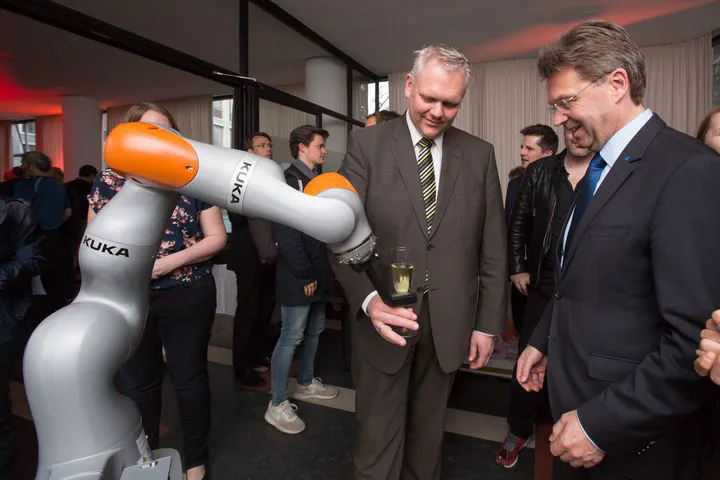
Copyright Michael SiebertThis was a demonstration I developed with the KUKA KMR iiwa. The robot picks up glasses of Champagne, which are stored on the robot’s mobile base. It then moves towards a person standing in front of the robot, which is detected with a Microsoft Kinect camera, and hands over the glass. The robot recognizes when the glass is removed via the built-in torque sensing capabilities.
We used this demonstration for several public events, because it is a great way to show the interplay between a collaborative robot with sensing capabilities, visual information from a camera and a mobile base capable of collision avoidance.