Non-Parametric Modeling of Spatio-Temporal Human Activity Based on Mobile Robot Observations
Abstract
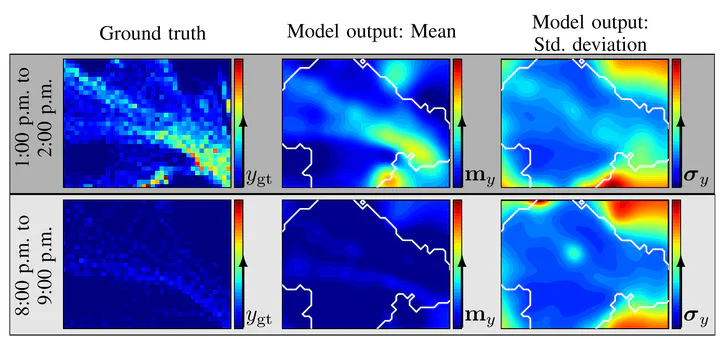
This work presents a non-parametric spatio-temporal model for mapping human activity by mobile autonomous robots in a long-term context. Based on Variational Gaussian Process Regression, the model incorporates prior information of spatial and temporal-periodic dependencies to create a continuous representation of human occurrences. The inhomogeneous data distribution resulting from movements of the robot is included in the model via a heteroscedastic likelihood function and can be accounted for as predictive uncertainty. Using a sparse formulation, data sets over multiple weeks and several hundred square meters can be used for model creation. The experimental evaluation, based on multi-week data sets, demonstrates that the proposed approach outperforms the state of the art both in terms of predictive quality and subsequent path planning.
Type
Publication
In 2022 International Conference on Intelligent Robots and Systems