Sobi: An Interactive Social Service Robot for Long-Term Autonomy in Open Environments
Aug 1, 2021· ,,,·
0 min read
,,,·
0 min read
Dr. Marvin Stüde
Konrad Westermann
Moritz Schappler
Svenja Spindeldreier
Abstract
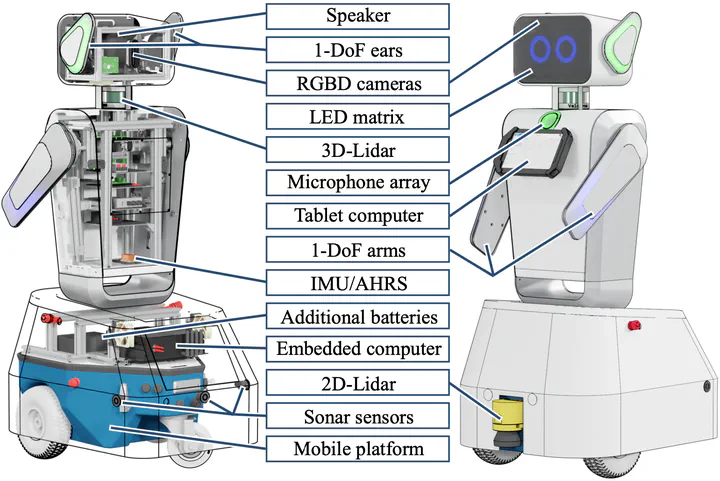
Long-term autonomy in service robotics is a current research topic, especially for dynamic, large-scale environments that change over time. We present Sobi, a mobile service robot developed as an interactive guide for open environments, such as public places with indoor and outdoor areas. The robot will serve as a platform for environment modeling and human-robot interaction. Its main hardware and software components, which we freely license as a documented open source project, are presented. Another key focus is Sobi’s monitoring system for long-term autonomy, which restores system components in a targeted manner in order to extend the total system lifetime without unplanned intervention. We demonstrate first results of the long-term autonomous capabilities in a 16-day indoor deployment, in which the robot patrols a total of 66.6 km with an average of 5.5 hours of travel time per weekday, charging autonomously in between. In a user study with 12 participants, we evaluate the appearance and usability of the user interface, which allows users to interactively query information about the environment and directions.
Type
Publication
In 10th European Conference on Mobile Robots (ECMR)